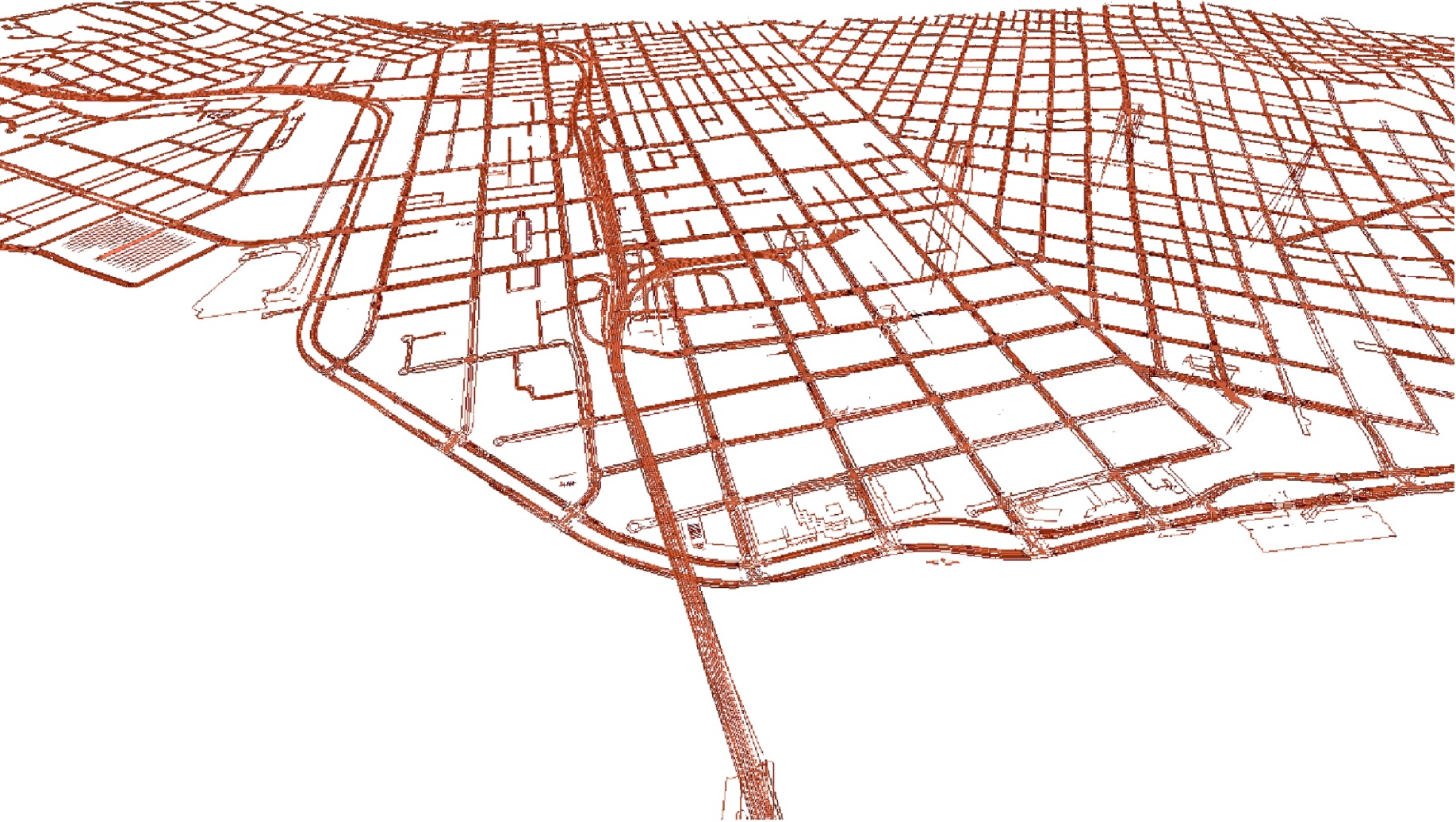
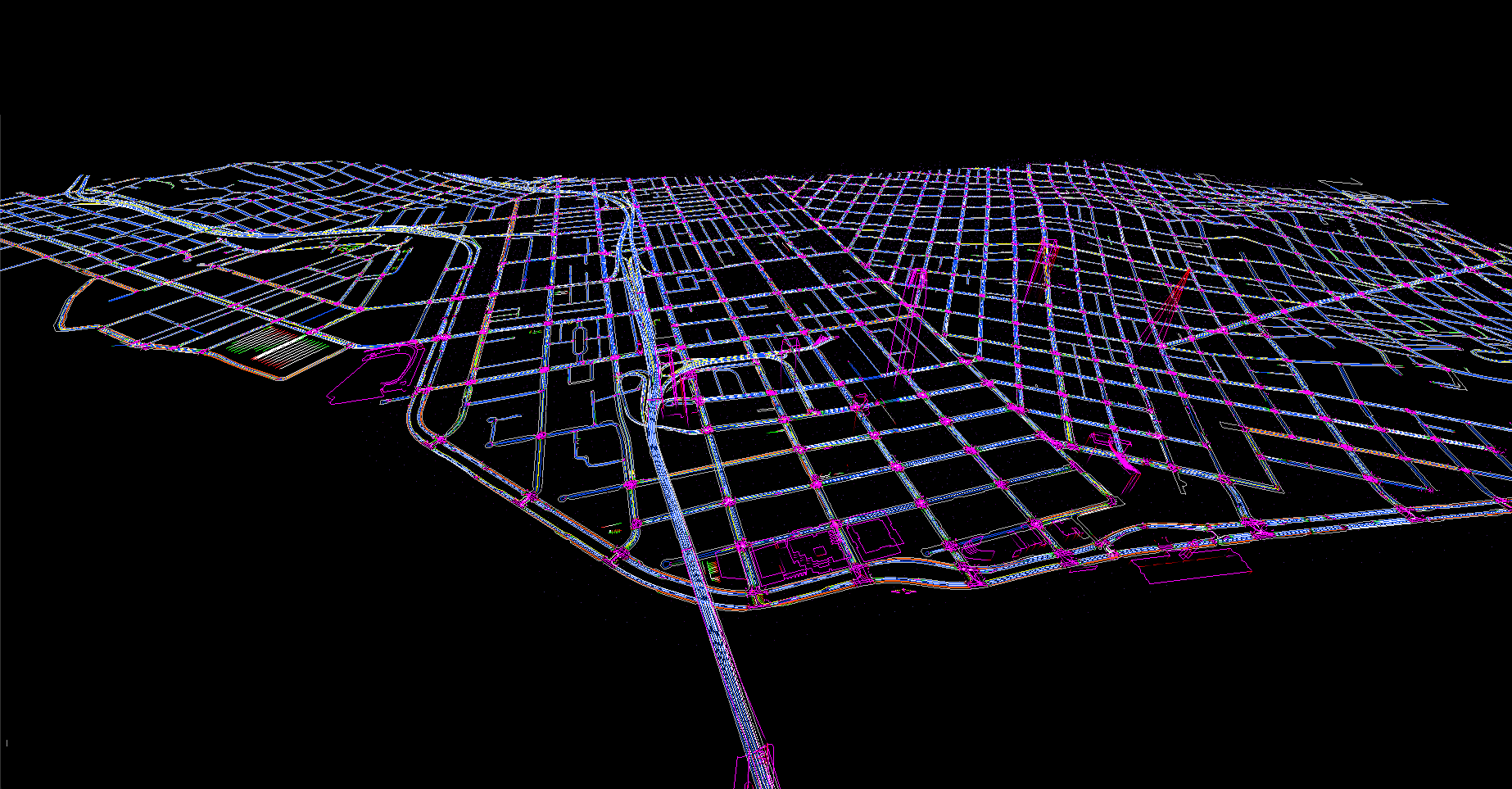
HD Mapping & Localization
United States
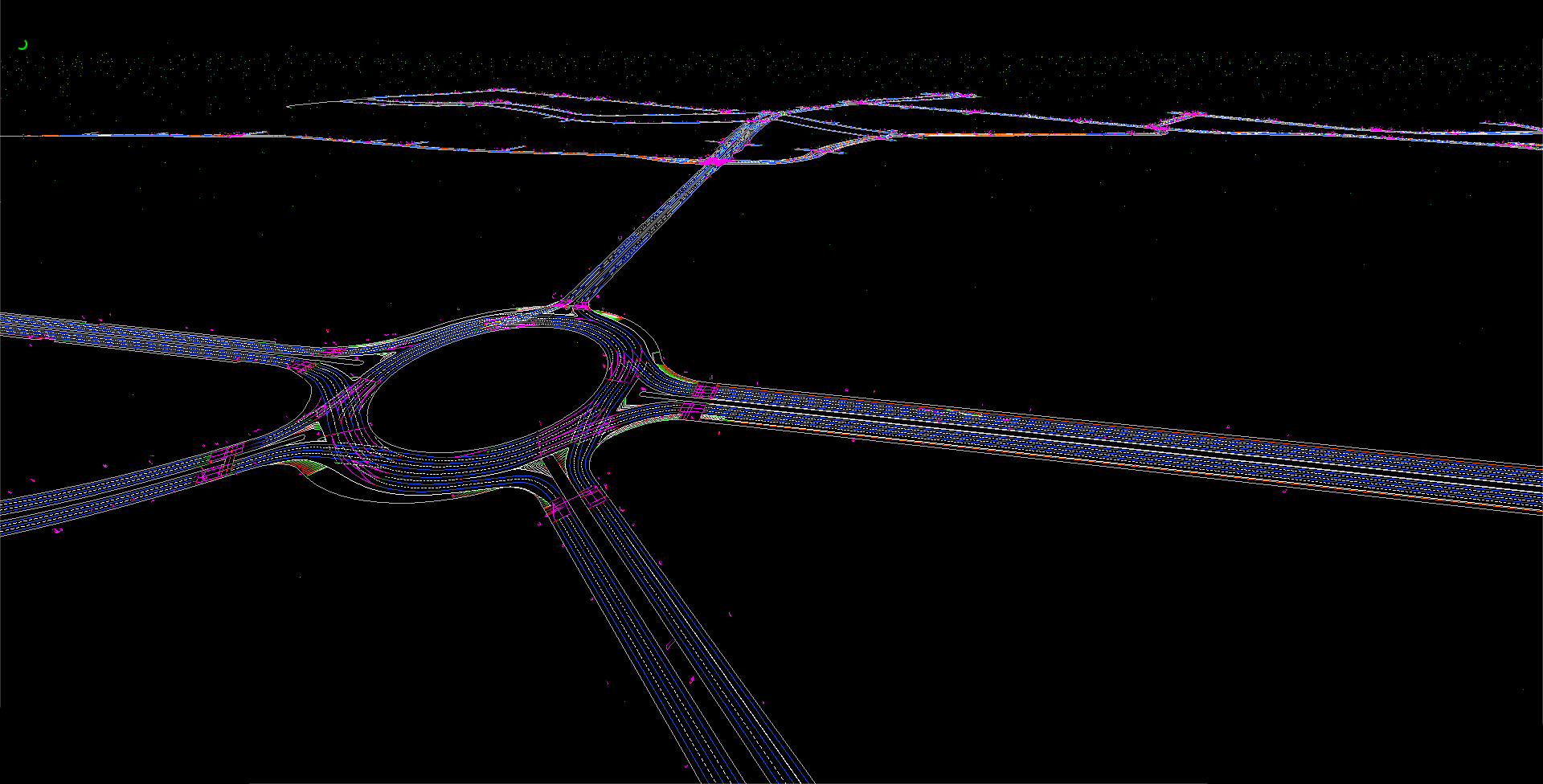
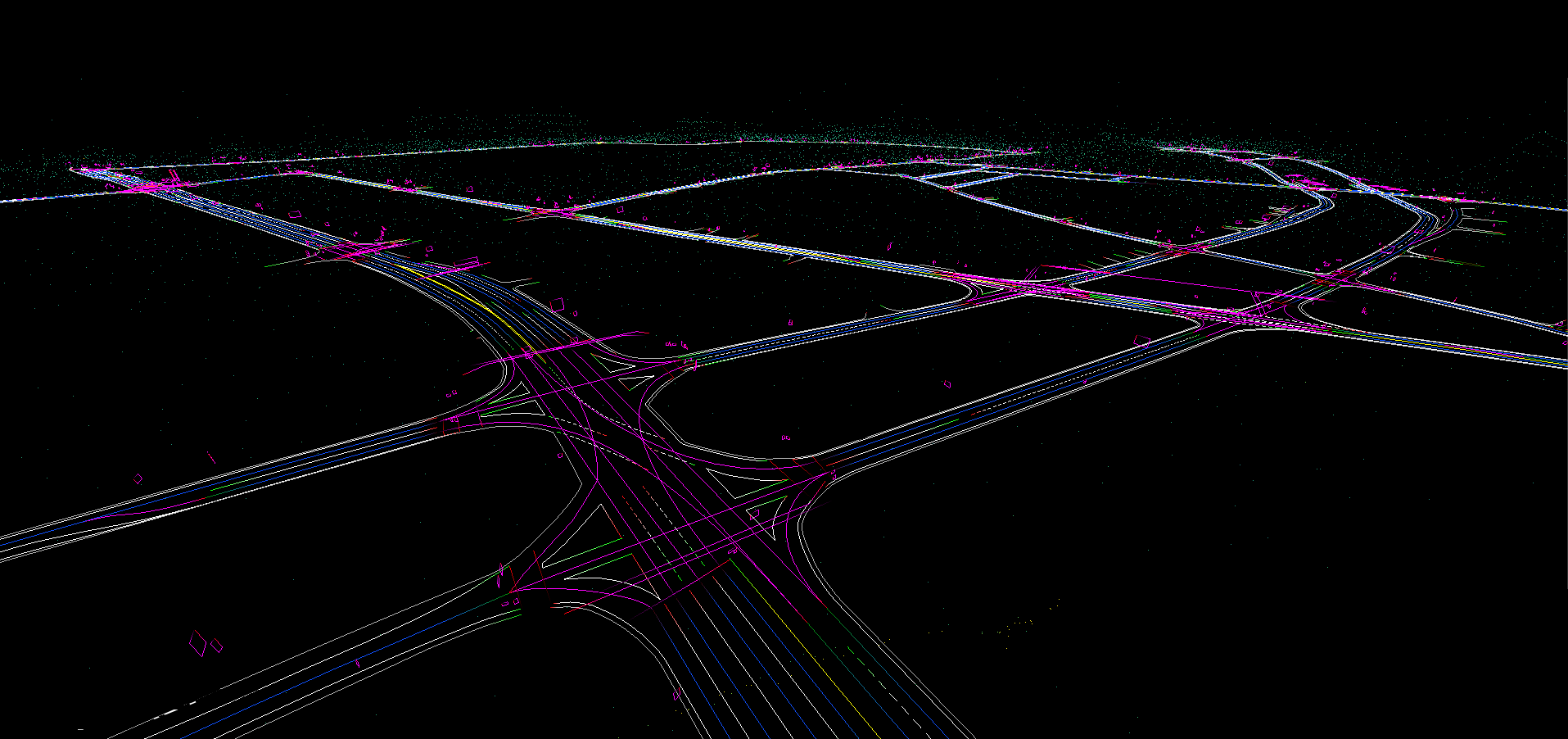
15 cm – 20 cm absolute accuracy
Europe
Scaling precision across continents
Asia
High-fidelity point cloud processing
Autonomous Vehicle Routing

Global Presence
15 cm – 20 cm absolute accuracy
Scaling precision across continents
High-fidelity point cloud processing