Standards in 3D scanning file types
In Lidar News article titled “Experiencing Legacy ASTM E57 for Heritage,” Paul Tice discusses the importance of a standard archival format for 3D laser scan data...
In Lidar News article titled “Experiencing Legacy ASTM E57 for Heritage,” Paul Tice discusses the importance of a standard archival format for 3D laser scan data...
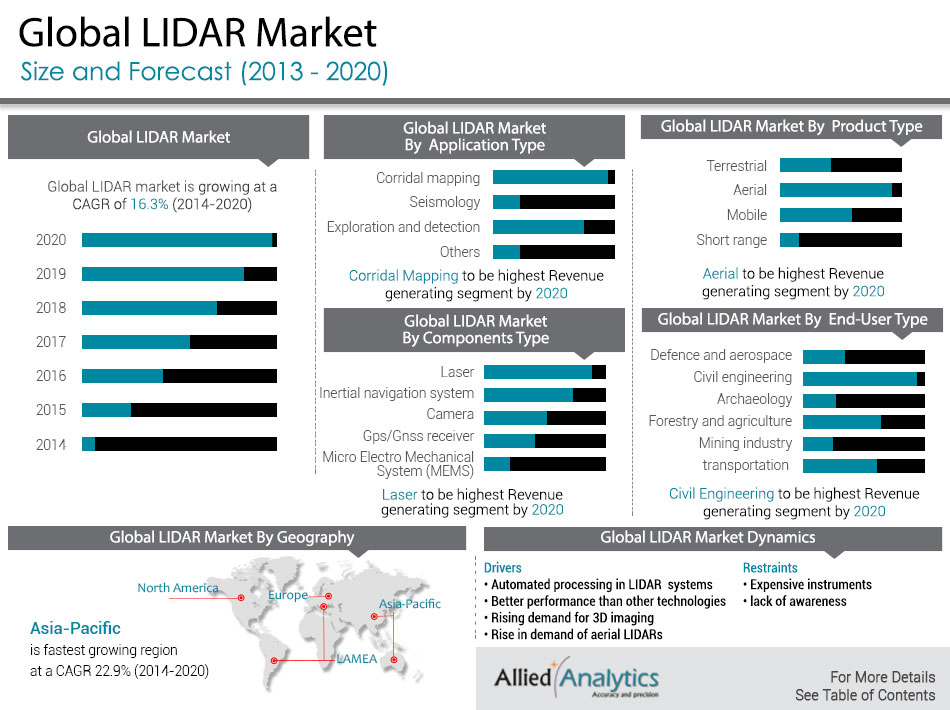
The LiDAR and 3D scan market is growing rapidly. According to Allied Market Research, the global LiDAR market is growing 16.3% CAGR...
The first Lidar News issue of the year featured several interesting topics including multispectral Lidar and advances in handheld Lidar...